



29 Oct 2005 - This morning I added a piece of steel in front for
extra weight and mounting space. I re-mounted the sharp sensors
horizontally on the block of wood.
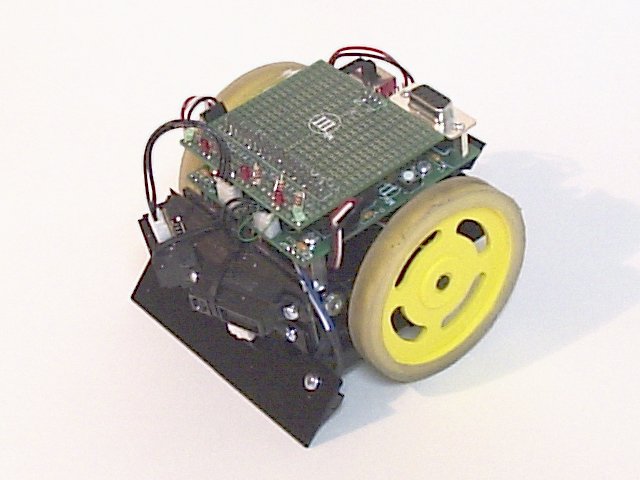
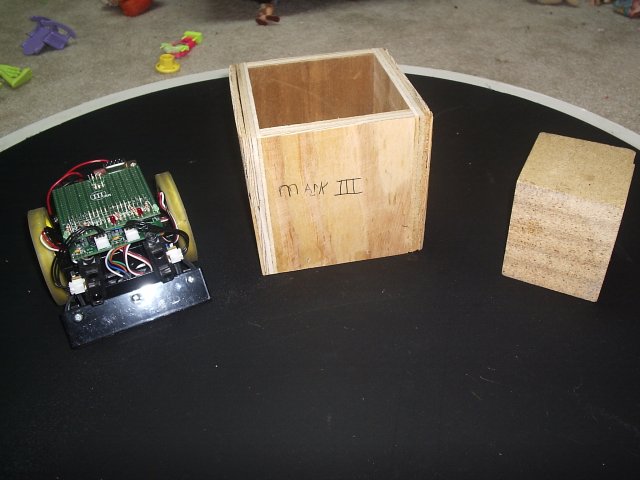
3Kram is my first Mini Sumo bot. It is based on the Mark III, which is a nice kit designed by the P.A.R.T.S (Portland Area Robotics Society). I built my bot up and Annie(age 6) christened the new bot 3Kram. After all the work I did to get the higher torque servos to fit, I felt it was quite appropriate. I built sizing box and a heavy block of wood for a simulated opponent. It is designed for Mini Sumo competitions.
Let me just plug the Mark III robot store for a moment: it is just great. The kit and accessories are inexpensive and well made. I highly recommend you check them out.
Bob Baxter was kind enough to give me a Sumo ring blank. I painted it up, and Annie added the words "Fight Ring" in ball point pen to the middle. At first, I built the standard kit, and was able to defeat my opponent a good 2 out of 3 times:
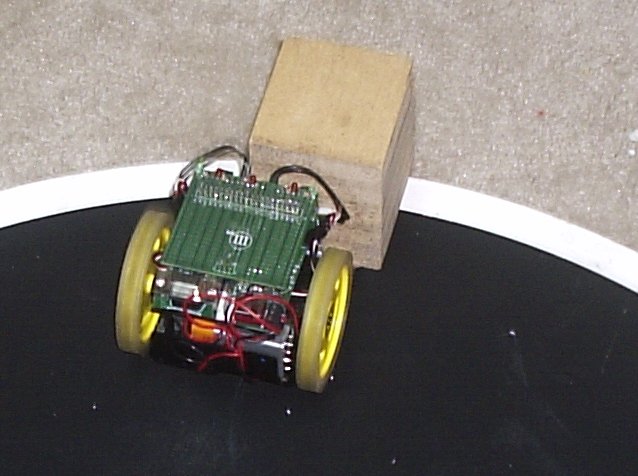
OK. So the joke about fighting an inanimate block of wood is getting kind of old. I did fight real robots, and learned quite a bit about what makes a good sumo robot.
Modifications I've made to the stock kit:
The most difficult modification was stuffing the high output servos into the 10cm width restriction. I used my bench sander to grind away "excess" plastic on the back of the casing, and a Dremel to grind down the wheel hubs and servo output axle. It just squeezes into the official measuring box.
| Bout | Opponent | Outcome | Comments |
|---|---|---|---|
| 1 | Stock Mark III | Loss | First fight (w/ no mods to my bot.) I forgot the 3 second delay. I used 4xAA rechargables and the other Mark III easily out powered me. I also had the add-on board soldered upside down! |
| 2 | Stock Mark III | Win | After modifications (new servos, more cells, sticky tires). Situation was pretty much reversed. |
| 3 | Delta Force | Loss | Delta Force is undefeated, so this loss is of no surprise. Of note, Delta force is much heavier than the Mark III kit. I'll need to get my weight up to have any hope of competing with the big boys. I guess I need to drop a line to Charles Atlas. |
Before I had noticed that my code is very sensitive to the position of the two sensors. A misaligned sensor would give higher readings than its counterpart.
I made a small triangular block of oak and mounted it on a little scrap of steel. This way, I can mount the sensors horizontally and I get a wider field of view. I'm having trouble fitting into the box, however.
At 350 grams, I needed more weight to go up against the pros. After adding the steel plate in front, the weight of the robot is at 15.1 oz (428 grams). The bot has to be under 500 grams to compete, but the closer it gets to 500grams, the harder 3Kram will be to push around.
In its current state with the eye sensors mounted at an angle horizontally there is a problem. The 2 sensors are not active at the same time, and it spins in circles looking for an opponent. So, I bought a third sharp sensor for detecting objects straight ahead. I think that will iron things out. I wonder about the if 3 sensors working at such close range will interfere with each other. For that reason, I think I'll put some kind of blinders on them.
Right now the bot's motor control is very clunky. It staggers left and right when it sees an opponent. I need to utilize some kind of proportional motor control (although I have no wheel encoders - that seems like overkill.) I think the third 'eye' will help a lot, too.
At the AHRC meeting, Buddy suggested I turn the yellow wheels into a smiley. Hmm. Maybe Buddy can do that with his own bot. I might use it for some kind of 3Kram logo.

